L’idée de construire un simulateur de conduite ferroviaire remonte à 2013, lors d’une visite à la Cité du Train où SIMCAB avait réhabilité un ancien simulateur de la SNCF. Le projet a mis 2 ans à murir, avec l’exploration de nombreuses solutions techniques (que je tenterai de vous présenter dans des articles sur ce site), le choix de la machine à représenter, etc, etc.
C’est en 2015 qu’il débute vraiment, avec la prise de mesures dans la cabine de la CC72029 de la Cité du Train (avec autorisation et sous la surveillance d’un salarié). Quelques temps après, les premières pièces en menuiserie sortent des ateliers FerroviSim.
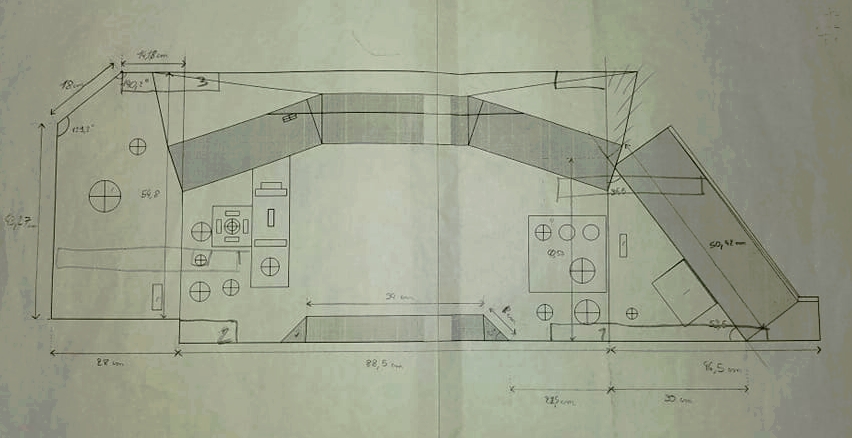
L’une des principales caractéristiques de ce premier simulateur est d’être fondé sur un pupitre entièrement en bois (hormis le manipulateur de traction) et de fabrication personnelle, faute d’avoir pu récupérer un pupitre avant le début des travaux. Il a donc nécessité, après étude et réalisation des plans, prêt d’un an de travaux de menuiserie. En parallèle, son câblage a été réalisé, ainsi que la programmation de ses cartes d’interfaçages Arduino.
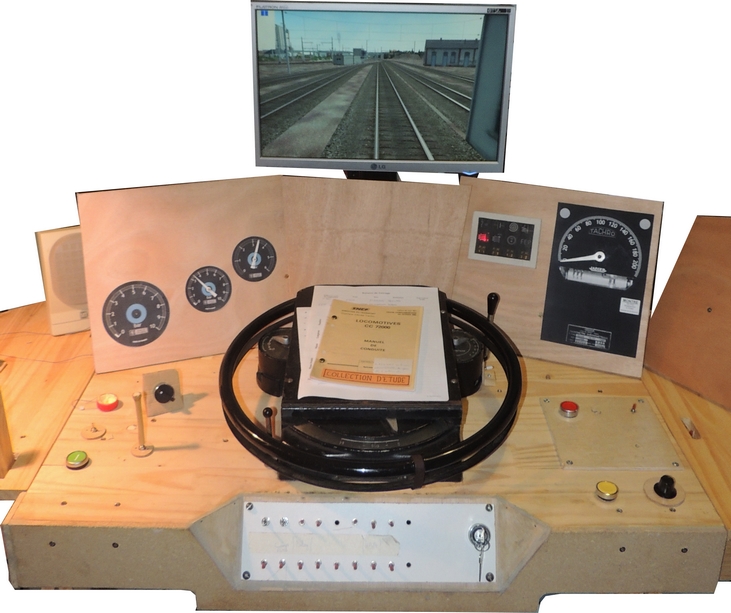
Le simulateur en 2018 dans sa version finale.
En septembre 2016, il est enfin opérationnel, et est exposé pour la première fois lors du salon du modélisme du RAMCAS à Mulhouse. Son développement se poursuit en 2016 et 2017 avec l’ajout de nouvelles pièces de récupération (clé de frein, KVB), pour s’achever avec une mise en peinture complète en juin 2017, qui a nécessité le démontage partiel du simulateur. Ainsi amélioré, il est à nouveau exposé en septembre 2017 à Mulhouse.
Le projet est mis en pause en 2018 (lors de mon entrée en classe prépa pour 2 ans). Le simulateur ne sera plus amélioré puisque le projet CC72000 V2 m’occupera à partir de 2020.
La construction du simulateur en image, de 2015 à 2018
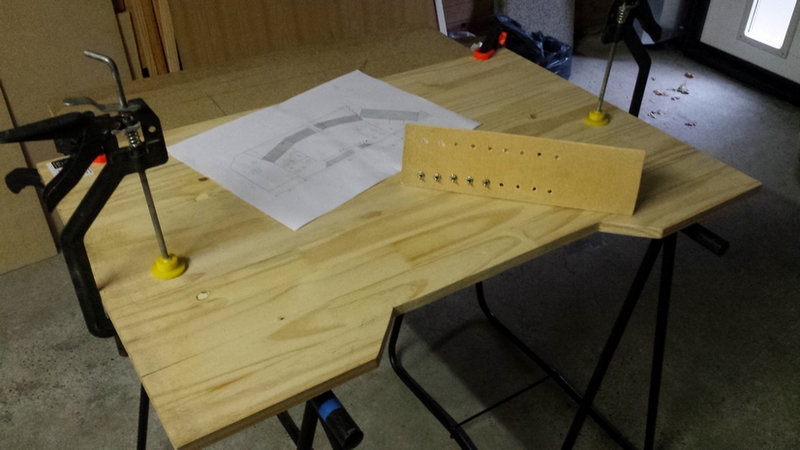
Premier assemblage et mise en place des premières commandes.
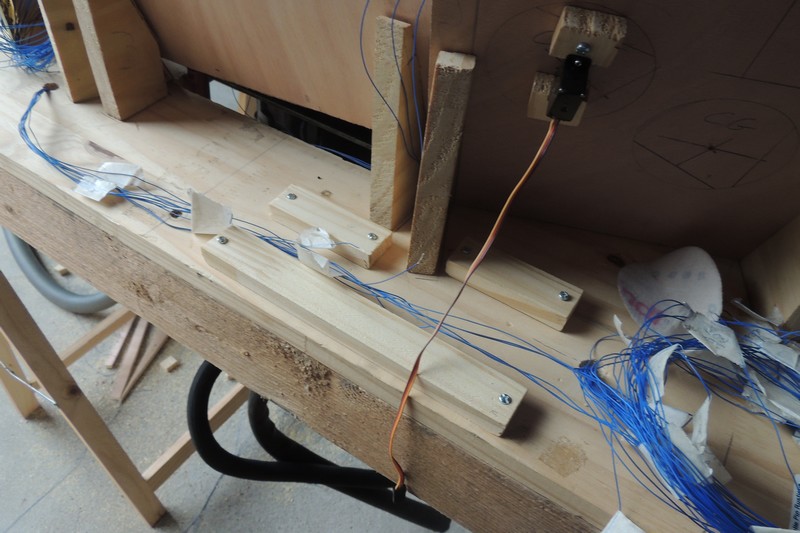
Installation des tasseaux.
Vue des tasseaux de renforts sous le pupitre.
Installation de la boite à leviers, les joints sont réalisés à l’aide de pâte à bois.
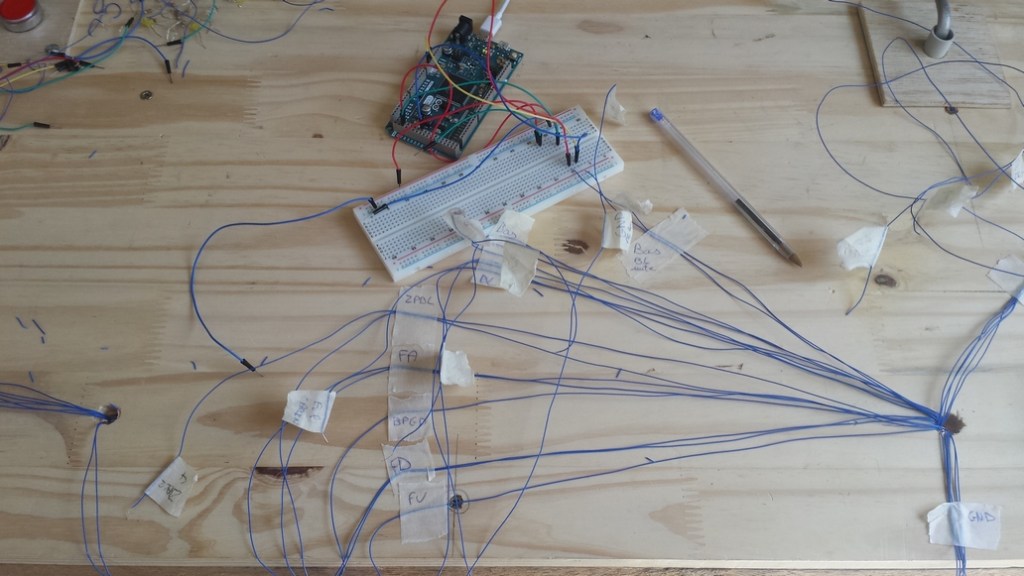
Début du câblage.
Câblage de la boîte à leviers.
Test du câblage.
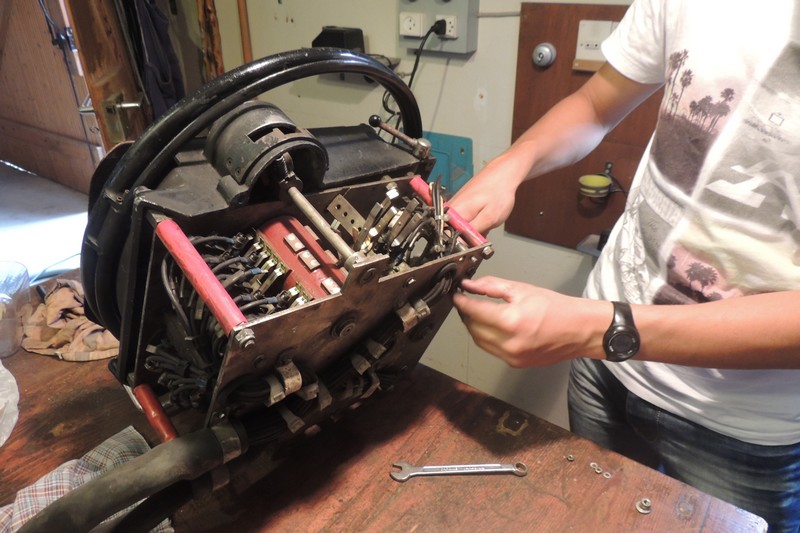
Remise en état et repérage du câblage du manipulateur de traction (provenant d’une BB17000).
Repérage du câblage au multimètre.
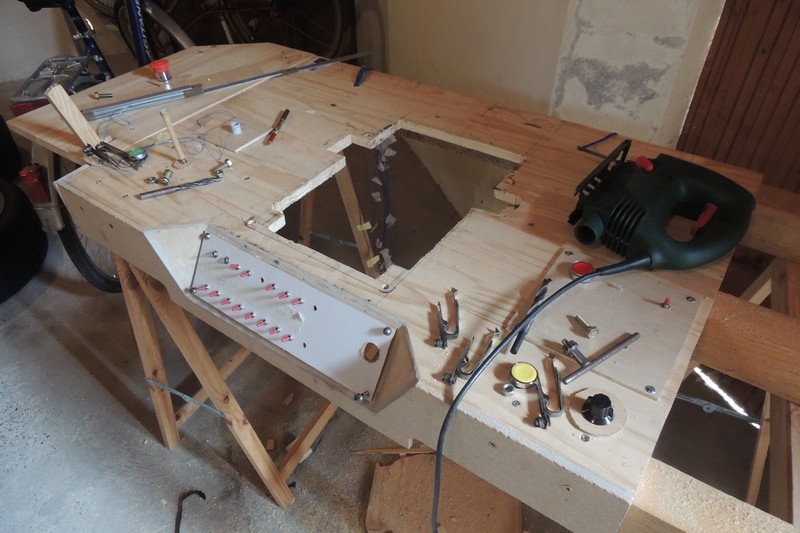
Découpe du pupitre pour mise en place d’un manipulateur de traction (provenant d’une BB17000).
Découpe du pupitre pour mise en place d’un manipulateur de traction (provenant d’une BB17000).
Le manipulateur de traction en place, ainsi que les panneaux inclinés.
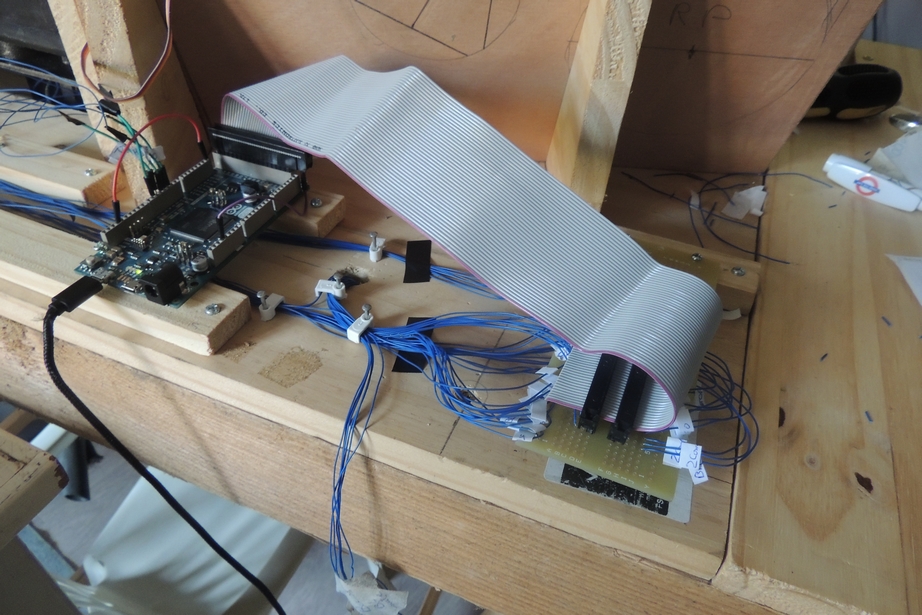
Supporte prêts à recevoir les cartes Arduino.
Unité centrale après mise en place de la carte Arduino Due. Le lien avec le câblage du pupitre se fait avec des nappes IDE pour laisser la carte Arduino amovible.
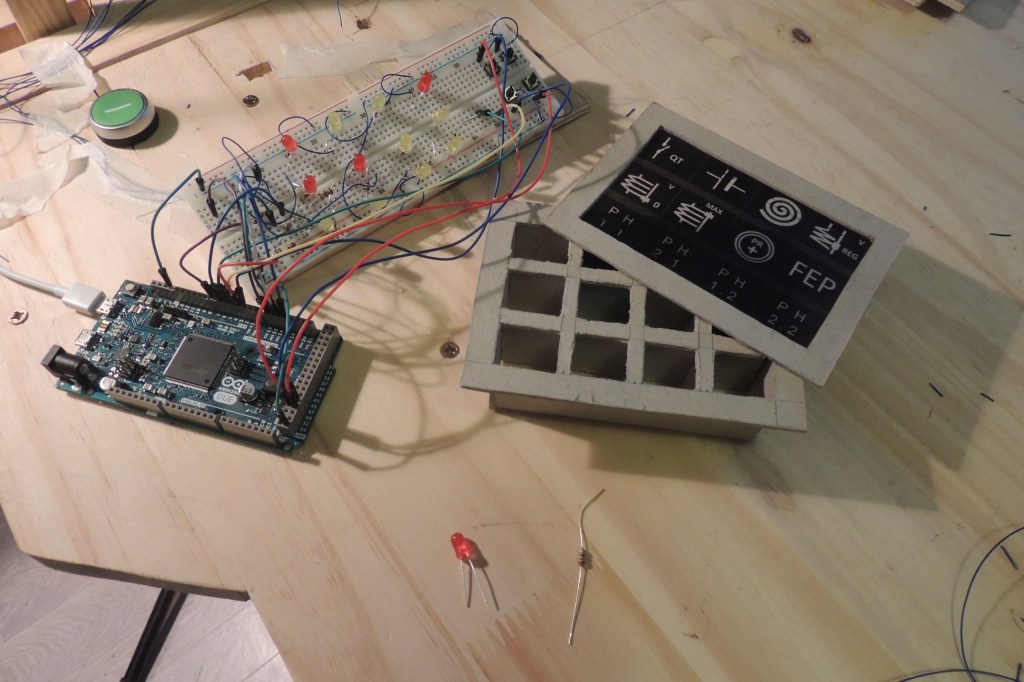
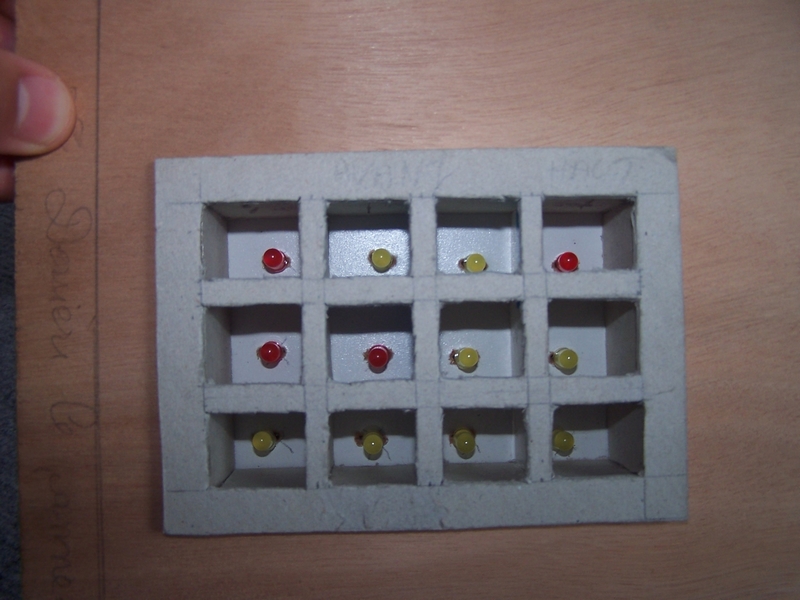
Fabrication et test d’un lumitex.
Pose du lumitex à LEDs.
Pose des manomètres et du tachro : les aiguilles sont commandées par des servomoteurs électriques.
Pose des voltmètres et ampèremètres fabriqués en bois et papier, avec des aiguilles sur tiges commandées par des servomoteurs.
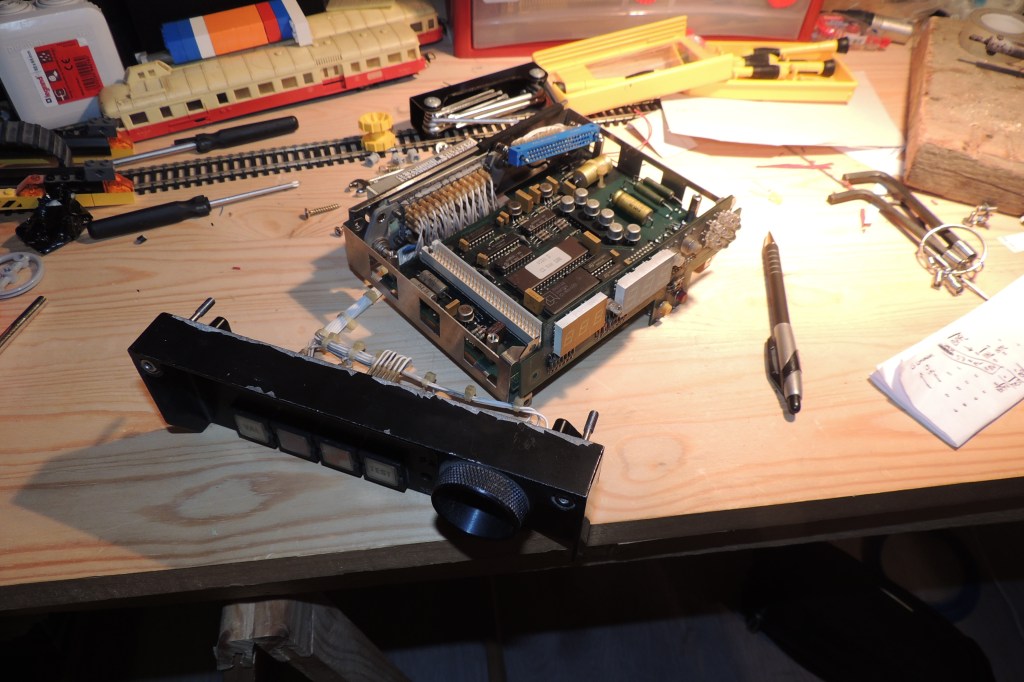
Analyse du KVB et repérage des branchements avant montage. La remise en service du KVB a nécessité la fabrication d’un système électronique de commande dédié.
Après la pose d’un nouveau manipulateur de traction (provenant cette fois d’une CC72000), du KVB, de la clé de frein et de la radio sol train (non fonctionnelle).
Mise en peinture.
Mise en peinture.
Après mise en peinture et remontage.
Après installation des parois en carton, le simulateur dans sa version finale.